|
Pour changer un peu de travail, je passe maintenant ŕ la confection du pilote. Etant donné que tout l'avant du planeur va ętre vitré, je vais essayer de camoufler au mieux les éléments, tel que batterie, plomb de centrage... Pour la masse de centrage, je vais donc mouler les bottes du pilote en plomb. Pour cela je récupčre mes moules en latex et je coule de la parafine.

Je coule du plâtre autour des bottes en parafine. Aprčs 24h de séchage du plâtre, j'enlčve la parafine en la faisant fondre au chalumeau.

Je chauffe ensuite au chalumeau, du plomb, dans une vieille casserole, puis je coule dans le moule, attention aux projections, ça bouillone en coulant dans le moule.

Le moule en plâtre est cassé pour en sortir la paire de bottes. Elles pčsent 1140g.

Un petit coup de nettoyage et polissage

23 Novembre 2011
Mise ŕ jour 24 Mars 2012 (voir page 5) - Ces bottes en plomb n'ont pas été utilisées et ont été remplacées par des bottes en résine PU de 110g + 360g de plomb pour le centrage
Pilote animatronique - Animatronic pilot
L'idée est d'avoir un pilote avec la bouche qui bouge et de diffuser un petit texte en Tchčque, enregistré sur un micro lecteur MP3 + ampli et HP. Pour résumer, le pilote se présente, et présente sommairement son planeur, cela dure 30s.
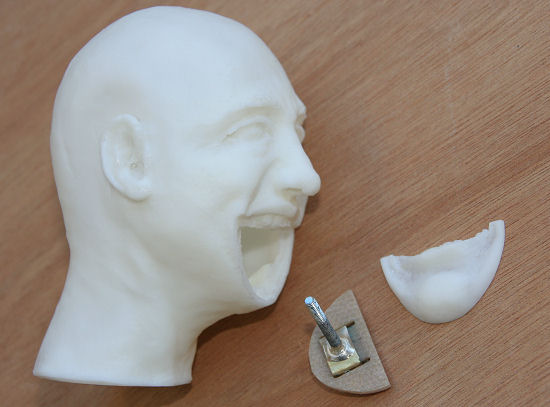
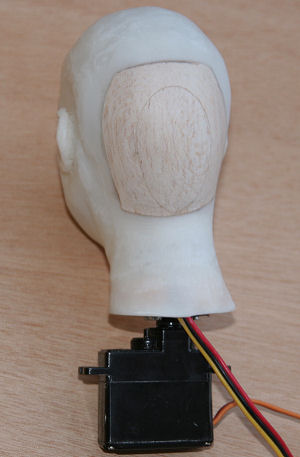
Moulage d'une tęte avec simplement de la résine PU, sans mousse PU ŕ l'intérieur + un autre moulage de la partie basse du visage car il n'est pas possible de la récupérer de la découpe. Voir moulage des pilotes sur cette page
Une petite base en laiton plié en U coulisse sur une platine, ŕ l'extérieur une platine époxy cuivré est soudé sur le U, la partie basse du visage sera collé dessus, et l'ensemble sera collé sur le bas du visage. Par l'intérieur une vis brasée reprend le mouvement avec une bielle sur un micro servo

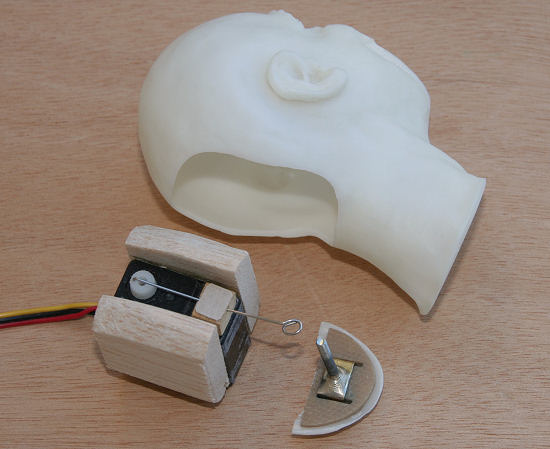
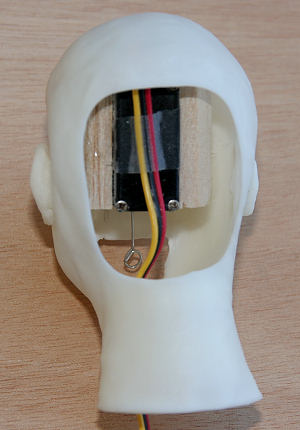
J'ai opté pour un micro servo ŕ rotation continu et une CAP de 0.8mm sert ŕ retransmettre le mouvement du servo ŕ la machoire. Du balsa de 8mm est collé sur les côtés du servo et l'ensemble est collé dans la tęte.
|
|
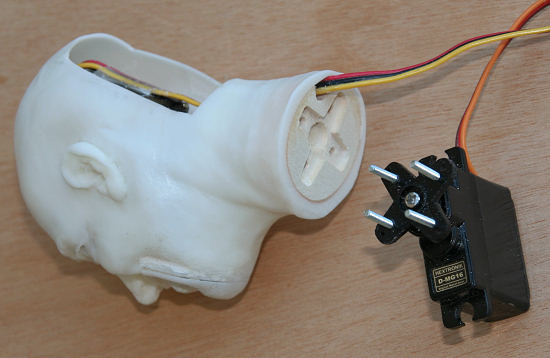
La tęte est montée sur un mini servo pignons métal afin de bouger avec la commande de direction. Une rondelle de CTP de 10mm est collée ŕ la base de la tęte, le palonnier de servo et 4 vis de 2mm s'encastrent en force dedans, la tęte reste ainsi démontable.
L'arričre de la tęte est bouchée avec du balsa poncé en forme.
|

30 Novembre 2011
Un moulage en résine PU est fait sur le dessus de tęte, ce sera le support du casque bol. Du cuir fin de 0.5mm (provenant de chez decocuir) est trempé dans l'eau puis mis en forme sur un master de bois dur, en l'étirant et en le séchant au fer ŕ repasser. Les pičces sont découpées puis collées ŕ la néoprčne. Les ourlets de bord
sont pliés et collés. Les fausses coutures sont faites avec une CAP limée chauffé au rouge. Le cuir est poncé au papier fin de carrossier pour le vieillir.
 
Les entourages des lunettes sont coupées dans du CTP multiplis de 5mm mis en forme. L'intérieur de l'alu est plus petit de 0.5mm pour former une feuillure et recevoir le rodhoďd. L'ensemble est peint puis collé ŕ la néoprčne sur le support en cuir.

La moustache n'est pour l'instant pas collée, elle camouflera bien le joint de glissičre de la bouche.

Comme je l'avais déjŕ fait sur mon triplan Clément, le sičge du MIRA sera en rotin, ce qui est bien dans l'esprit des machines des années 20. L'assise est en CTP de 3mm, l'entourage en fil d'alu de 2mm recouvert de papier craft enroulé.
Les montants en rotin de 2mm sont plantés dans l'assise du sičge et sont tenus sur le
fil d'alu avec un enroulage de rafia. La cloture est en rotin de 2mm. Le rotin se travaille trčs facilement aprčs l'avoir laissé tremper 1/2h dans l'eau. Une tresse ŕ 3
brins est enfilée sur les montants et termine le bord du
sičge. Tout ce qui dépasse est arrasé ŕ la lame de rasoir

08 Décembre 2011

Le corps du pilote est en CTP de 6mm, un servo actionnera le bras gauche. Le sičge est solidement fixé sur du pin 9x9 et sur le plancher. Le corps du pilote est vissé sur le sičge.
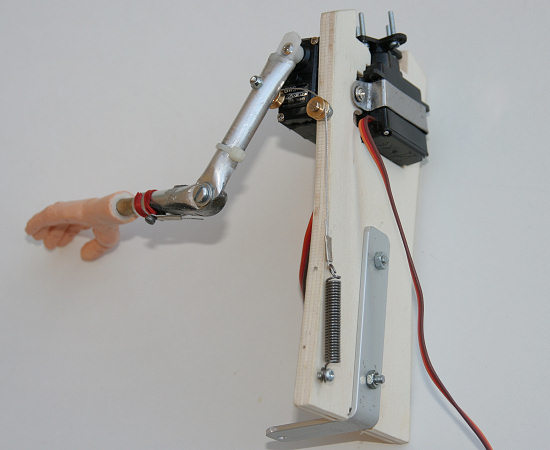
Lŕ je dois dire que je me suis bien cassé la tęte pour animer le bras. Le bras est fixé au palonnier du servo, lorsqu'il monte, l'avant bras se plie et ensuite la main tourne. Pour cela, un câble est fixé au tube qui supporte la main, ce tube pivote dans l'avant-bras. Lorsque le bras se lčve, cela tire sur le câble qui referme l'avant-bras puis fait pivoter la main vers l'intérieur. Le fil élastique rouge sert
de rappel pour remettre la main ŕ plat en position basse. L'extrémité du câble est fixée ŕ un ressort dur, qui ne sert que de sécurité au servo en position haute bras levé. Le ressort empęche également au câble de rester dans les gorges des poulies en position repos.

11 Décembre 2011
Pour animer le pilote, j'envisage d'essayer d'utiliser une carte ARDUINO programmable, plutôt que de tout brancher sur des voies du recepteur. Idéalement ça permettrait de synchroniser le mouvement de la bouche avec le message vocal, et de déterminer des phases de mouvements du bras et de la tęte.

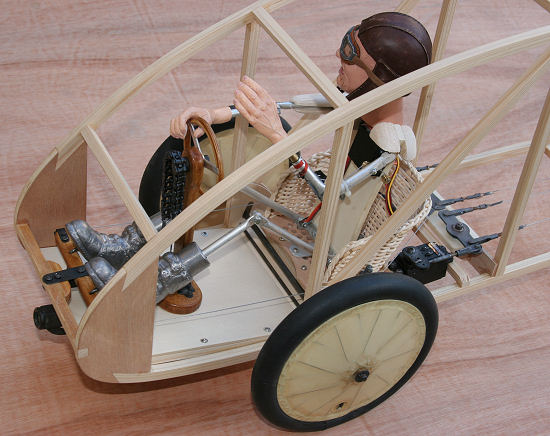
Le plancher avant est ajusté, le pilote est en place. Les bottes devront ętre solidement fixées au plancher, calées sur un palonnier. Le pilote prendra place en insérant les tubes des jambes dans les bottes.

Sous le plancher avant, est collé un CTP de 3mm multiplis, entaillé aux dimensions du servo et du crochet de remorquage. L'habillage du crochet est en tôle d'acier pliée et brasée ŕ l'agent, ŕ l'avant est brasé un anneau récupéré d'un piton. Dessous est brasé le crochet de treuillage en acier de 1.5mm. Le palonnier est découpé dans du fręne, les ferrures sont en tôle d'acier. Tout est bronzé au Klever.

Les talons des bottes sont coupés et limés en biais afin d'avoir une surface d'appui sur le plancher, ils sont percés puis une vis de 4mm est insérée. Un morceau de patin téflon est collé afin de réduire le frottement. Une CAP de 3mm est pliée et collée dans la botte et rentre dans le palonnier. Les vis de talons coulissent dans les rainures du plancher, par dessous une rondelle et goupille beta verrouillent
l'ensemble. Les tubes alu des jambes rentrent dans les bottes et sont verrouillés par une épingle en CAP de 1mm plié en U.


15 Décembre 2011
Le palonnier bouge sans forcer en entrainant les bottes et les jambes. Il est relié par câbles au palier de direction, du côté droit en direct, du côté gauche avec une poulie pour dévier sa trajectoire.


Sur une des photos du grandeur, on a l'impression de deviner un volant, on en voyait sur certains avions de cette époque, alors pourquoi pas sur le MIRA... Comme je l'ai déjŕ dit, tout est d'inspiration personnelle et peu importe l'aspect de fidélité maquette, ça ne peut de toute façon en ętre une, étant donné que je n'ai trouvé aucun document de ce planeur.

La chaîne et le pignon proviennent de pičces détachées de moto RC
19 Décembre 2011

J'avais envie de me faire plaisir ŕ façonner un accessoire original, Marc sur le forum, me suggčre en plaisantant, un klaxon. Le Falke du musée de la Wasserkuppe possédant justement une trompe, pourquoi pas en mettre une sur le MIRA. On imagine qu'elle aurait pu servir pour avertir des passages sur la pente. La trompe est entičrement martelée dans une feuille de cuivre de 0.5mm (une journée de boulot au marteau) la
poire est en caoutchouc massif. Le vitrage avant étant ouvert au niveau de la main, on peut imaginer l'animation du bras qui ira jusqu'ŕ la trompe: pouët pouët! avec le bruitage sur le MP3 programmé avec l'animation du pilote parlant Tchčque.

|
|
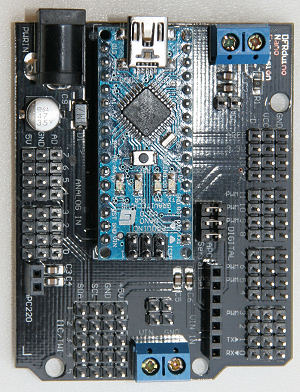
Ayant reçu la carte Arduino Nano et son shield, je peux me pencher sur son fonctionnement pour animer le pilote. Merci pour l'aide apportée par les forums Arduino et robot-maker. Le principe est d'écrire des instructions en language C dans le logiciel d'Arduino correspondant aux mouvements désirés des 3 servos, bras, tęte et machoire. Le logiciel compile ce code et l'envoie au micro contrôleur de la carte via l'USB.
Le principe de programmation, est d'assigner des temps de fonctionnement et de pause en milli secondes, ainsi que déterminer l'ordre de fonctionnement et de répétition de chaque servo, ses déplacements en degré...
|
Finalement j'ai ré-ouvert la tęte pour remplacer le servo de machoire ŕ rotation continue, par un mini servo classique, moins bruyant et plus simple ŕ programmer. Cette fois-ci le mouvement de la machoire s'entend ŕ peine et ne gčne pas l'audition de la bande son.
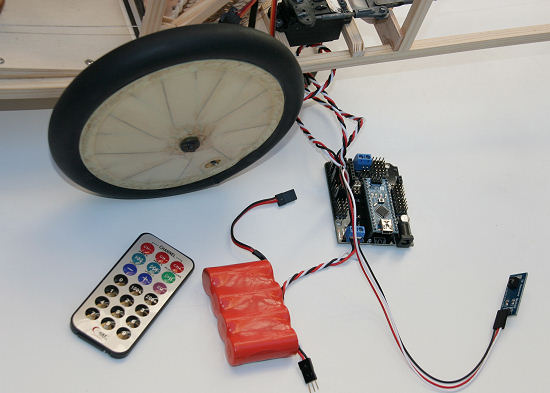
L'animation est ensuite déclenchée par une télécommande infra rouge, synchronisée avec la bande son qui est jouée par un micro lecteur MP3 raccordé ŕ un ampli + HP. Dans un second temps j'essayerai d'intégrer un module MP3 sur la carte Arduino. Pour l'instant c'est un peu du bricolage, car je dois déclencher manuellement le lecteur MP3 et sur la bande son, j'ai un bip de départ qui me permet d'appuyer
sur la télécommande pour lancer l'animation du pilote.
Voir l'animation du colonel Rudolf Holeka
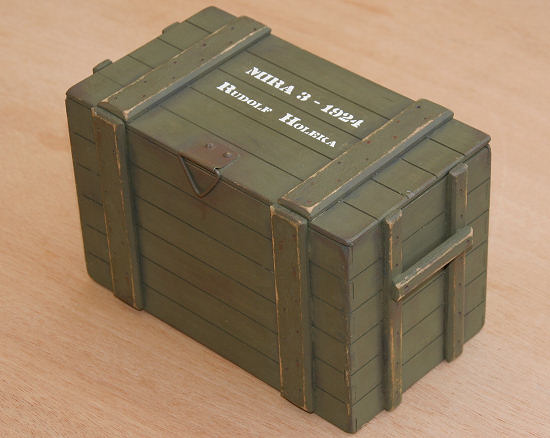
J'envisageais au départ d'installer tout le matériel d'animation derričre le pilote, mais vu l'encombrement et le poids, j'ai préféré construire une petite caisse en CTP qui sera posée au sol contre le planeur et qui se branchera discrčtement sous le fuselage. L'animation ne se faisant qu'au sol, ça ne servait pas ŕ grand chose d'embarquer cet équipement.
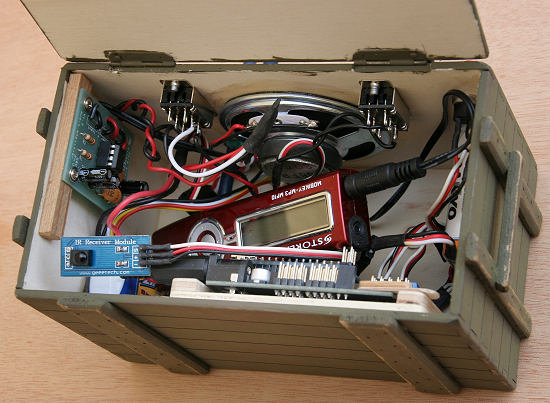
Vue arričre, qui ne se verra pas, puisque la caisse sera contre le fuselage, avec le haut parleur, les interrupteurs et la prise du fuselage. La caisse est peinte ŕ la Humbrol et vieillit, les lettrages sont peints avec un pochoir découpé ŕ la CraftRobo.
J'ai remplacé le lancement de l'animation avec un bouton poussoir, plus pratique que le lancement par la télécommande IR.

31 Décembre 2011
Modification du lecteur MP3 et de son lancement
On trouve sur ebay.com des mini lecteurs MP3, ŕ 3 euros port compris, (faire recherche avec mots clés "mini clip mp3") Il y a différentes versions, coque plastique ou métal. J'en ai commandé 1 de chaque afin de voir s'il y avait des différences. Celui ŕ coque métal est bien moins pratique et m'aurait été trop complexe ŕ brancher, car il garde en mémoire l'endroit oů s'est arrętée la bande son et il faut lancer
le son avec le pavé de boutons. Celui ŕ coque plastique est idéal pour mon utilisation, car la bande son se lance ŕ son début et automatiquement dčs qu'on le met sous tension.


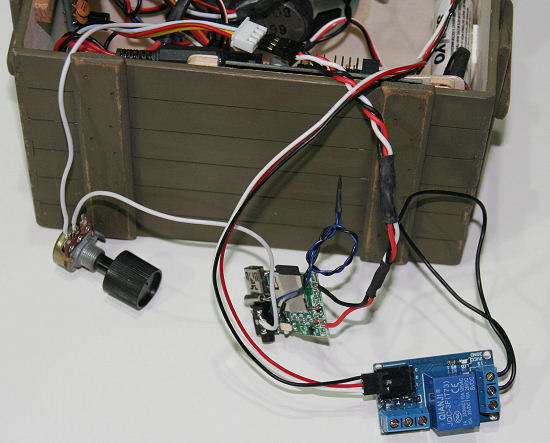
Boitier ouvert, on découvre un élément lipo de 130mah soudé sur 2 gros plots, facile ŕ reprendre avec un fer ŕ souder "normal". Je le brancherai donc sur ma batterie lipo 3S servant ŕ alimenter l'Arduino, en utilisant qu'un élément via la prise d'équilibrage de l'accu. L'interrupteur du lecteur reste sur ON, et il suffit de couper un fil de l'alim et de le relier sur un relais branché sur l'Arduino. Je soude
un fil sur la prise jack du lecteur, relié ŕ un potentiomčtre, puis direction l'ampli audio. Je peux ainsi faire varier le volume sans me préoccuper du pavé de boutons du lecteur.
08 Février 2012
Le code initial est modifié afin de déclencher le relais via le bouton poussoir, qui déclenche également en męme temps l'animation. Ma bande son est refaite, afin de supprimer mon bip départ qui me servait ŕ déclencher manuellement la synchro. J'obtiens donc maintenant ce que je souhaitais au départ. Donc en actionnant le bouton poussoir, le relais déclenche l'audio du lecteur MP3 et l'animation synchronisée.
L'enregistrement en Tchčque m'a été trés gentiment fait par Libor, webmaster de l'excellent site kolmanl.info

Le pilote est enfin terminé. Pantalon de toile grise, chemise blanche, cravate et veste en cuir. Malgré la faible épaisseur du cuir 0.5mm, il a fallut le torturer au fer ŕ repasser et papier de verre, pour l'assouplir et le patiner un peu. Les bottes de plomb, 1100g, seront peut ętre ŕ alléger selon centrage...


09 Janvier 2012
Le code de programmation de l'animation a été refait, en ajoutant des micro coupures ŕ la machoire, de tous petits mouvements de tętes et un petit tremblement de la main autour de la poire de trompette. Il a fallut de nouveau synchroniser les "delay" du code avec la bande son. Męme si c'est perfectible, je considčre que c'est terminé.

Voir le code d'animation pour Arduino
Vidéo de la derničre animation du colonel Rudolf Holeka
|